Serial¶
The communication between the controller and the commander is done over a serial interface. This allows for real-time communication, though only when proper hardware implementations are in place on both ends.
In most cases, serial peripherals for a PC and for the Arduino will not be available, at which point it makes sense to fall back to the Serial-over-USB capability of the Arduino Due.
Note that this introduces latency due to the finite frame exchange interval of the USB protocol. In practice this means a round-trip time of ≈ 4ms when using Serial-over-USB.
Round-trip time¶
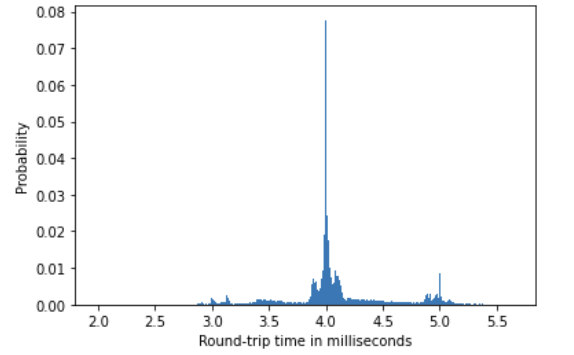
The round-trip time is defined as the time from sending a ping until the corresponding pong has been received.
Below is a measurement of \(5 \cdot 10^4\) ping-pong episodes.
The vast majority of episodes seem to fall around the \(4\, \text{ms}\) mark.
Protocol alignment¶
Since the Protocol operates at a byte-level, there is no easy way to realign to a packet ID if misalignment ever occurs. For this reason, a reliable serial connection is critical.
Ensure that an appropriate baudrate is used.
See also: Noise suppression
Buffer size¶
By default the serial buffer size of the Arduino is a measly 64 bytes, which means that it will quickly overflow and cause misalignment if not read from sufficiently often.
This can be mitigated by ensuring that the Commander empties the serial buffer often,
and further mitigated by increasing the buffer size using the SERIAL_BUFFER_SIZE definition.
This can be done using platform.io in the platformio.ini file with a build flag -DSERIAL_BUFFER_SIZE=<buffer size>
Noise suppression¶
Currently without any noise suppression the experimental system seems to get misaligned very rarely, but this can be an issue if running the system for multiple hours or days.
While an ACK/NACK-style protocol would arguably be the most robust choice, this would add a lot of complexity to the protocol and thus hasn't been implemented.
Instead the Commander will request a realignment sequence to be sent by the Controller if it experiences misalignment. This does lead to some packet loss since any bytes prior to the realignment sequence will be flushed and are not resent.
Given the rarity of noise, this approach will generally be robust enough to to have very long running experiments.
Artificial noise can be added for testing using the constants defined in PacketSender.h of the Controller.